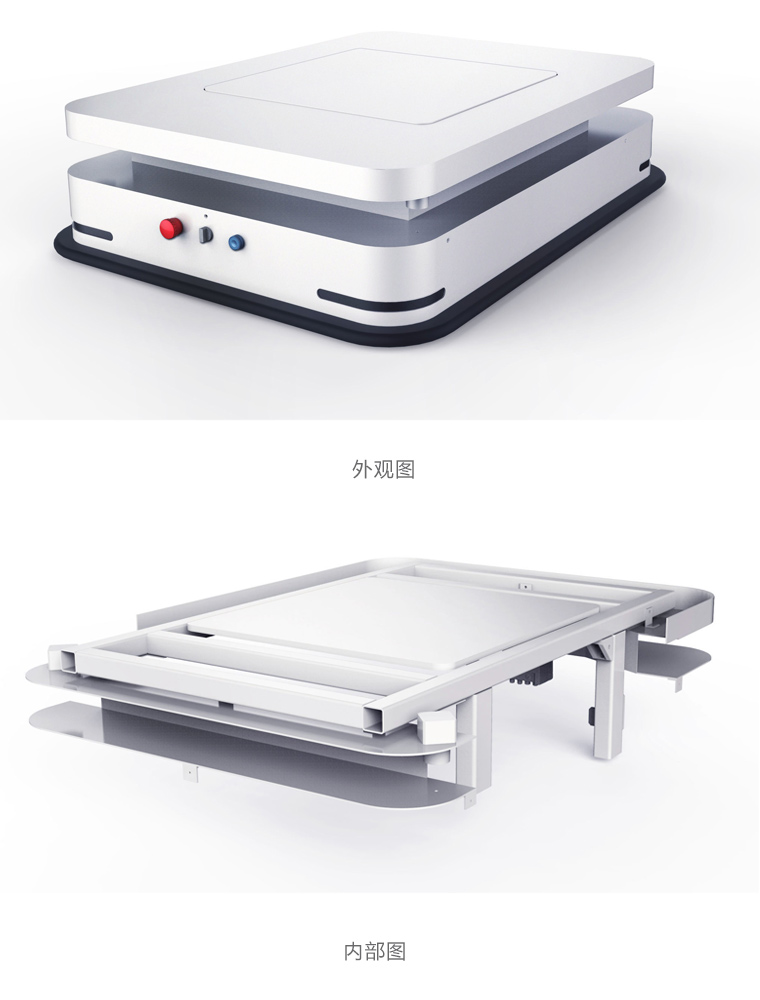
全向背负式AGV
激光无轨AGV是面向服务机器人、工业室内巡检推出的自主移动平台,使用自然导航技术,无需在使用场景中部署磁条/磁钉等设施,即可实现平台的自主移动
配合我司的任务部署及调度系统CAFM系统软件使用,可完成现场环境学习及任务快速部署
同时激光无轨AGV提供了面向系统集成及开发者的软硬件二次开发接口,可以实现基于AGV平台的应用开发
设备参数:
设备特性:
1、激光无轨AGV是面向服务机器人、工业室内巡检推出的自主移动平台,使用自然导航技术,无需在使用场景中部署磁条/磁钉等设施,即可实现平台的自主移动。
2、配合我司的任务部署及调度系统CAFM系统软件使用,可完成现场环境学习及任务快速部署。
3、同时激光无轨AGV提供了面向系统集成及开发者的软硬件二次开发接口,可以实现基于AGV平台的应用开发。
|
外形尺寸 |
1.2米x0.9米x0.33米(长x宽x高)可定制 |
|
导航方式 |
激光导航 |
|
控制方式 |
集中调度 |
|
走行方式 |
前进后退,左右转弯 |
|
通讯方式 |
无线局域网 |
|
运载重量 |
200KG/500KG(可定制) |
|
安全防护 |
障碍物传感器+防撞机构双重防护 |
|
走行速度 |
0-35m/min |
|
导航精度 |
±10mm |
|
爬坡能力 |
≤3° |
|
停车精度 |
±10mm |
|
充电方式 |
手动充电/自动充电 |
|
驱动方式 |
差速驱动 |
|
驱动电压 |
DC24V/DC48V |
|
报警方式 |
声光报警 |
|
安全感知距离 |
0~3米,可调 |
|
车体使用寿命 |
≥10年 |
设备特性:
1、激光无轨AGV是面向服务机器人、工业室内巡检推出的自主移动平台,使用自然导航技术,无需在使用场景中部署磁条/磁钉等设施,即可实现平台的自主移动。
2、配合我司的任务部署及调度系统CAFM系统软件使用,可完成现场环境学习及任务快速部署。
3、同时激光无轨AGV提供了面向系统集成及开发者的软硬件二次开发接口,可以实现基于AGV平台的应用开发。